Dezentral
Dezentrale Visionlösungen haben zur Aufgabe Entscheidungen auf Basis von Bildinformationen vor Ort zu treffen, um Aktionen direkt ansteuern bzw. beeinflussen zu können. NET ermöglicht Anwendern individuelle Lösungen zu erstellen. Der Vorteil einer flexiblen und offenen Visionarchitektur ist ihre Einzigartigkeit: die Kamera wird Teil der anbieterspezifischen Anwendungslösung. Dezentrale Lösungen können als „all-in-one“ Visionsystem oder als Embedded Vision System ausgelegt werden.
in der Bildverarbeitung
KI > Machine Learning
Wenn zuverlässig unbekannte und unvorhersehbare Fehler auf Oberflächen und in Geweben zu verifizieren sind, erfährt künstliche Intelligenz verstärkt Bedeutung. Dabei spielt es keine Rolle, ob es um Bahnwaren, metallischen Oberflächen oder Verpackungen geht. Es gilt: Null Fehlertoleranz. Die Genauigkeit schafft beste Voraussetzungen für prädiktive Maintenance Konzepte der Zukunft.

Pick and Place
Variabel, schnell und robust muss es sein? Die Antwort: Robot-Guidance. Ein Sensor wird an der Hand eines Roboters fixiert und fährt dessen Bewegung nach – auch mit hohen Geschwindigkeiten. Ihre Objekte auf dem Förderband werden sicher detektiert und können durch einen Delta-Roboter blitzschnell gegriffen werden. Zudem leisten unsere Kameras an Anlagen zur Steuerung von autonomen Transportsystemen durch die hohe Variabilität einen wertvollen Beitrag.
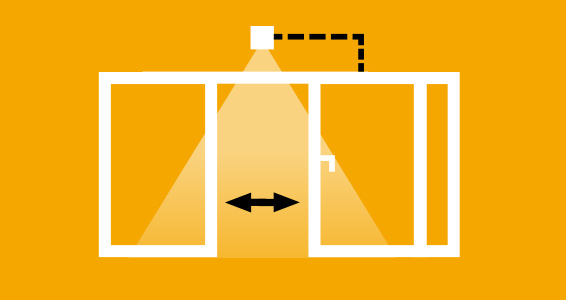
Zugangskontrolle
Die genaue Messung von Besucherströmen im Einzelhandel setzt moderne Kameralösungen voraus, die auch unkomplizierte Zugangskontrollen ermöglichen. In Kombination mit biometrischen Schlössern ergeben sich neue Möglichkeiten. Die Sicherung von Mitarbeitern in der Nähe von Robotik Applikationen und die rechtzeitige Erkennung von Hindernissen innerhalb des Aktionsradius von Robotern bedingt geringste Reaktionszeiten, um keine Fehler zuzulassen.
